多线程的使用
多线程
一.线程(Thread)
定义:一个线程就是一个”执行流”,每个线程之间都可以按照顺序执行字节的代码,可以”同时”执行着多份代码,其中,main()一般被称为主线程(Main Thread)
多进程同样可以实现同时执行任务,但是
线程比进程更加轻量
而且,人们为了更进一步,又诞生出了,”线程池”和”协程”
进程和线程的区别?
- 进程是包含线程的,每个进程至少有一个线程存在,即主线程
- 进程和进程之间不共享内存空间,同一个进程之间共享同一个内存空间
- 进程是系统分配资源的最小单位,线程是系统调度的最小单位
- 一个进程挂了一般不会影响到其他进程,但是可能会把进程内的线程一起带走
二.C语言中的线程操作
创建线程,利用posix库,可以创建线程
pthread_create(thread,attr,start_routine,arg);参数解释:
- thread 指向线程表示符指针
- attr 一个不透明的属性对象,可以被用来设置线程属性。可以指定对象,默认值为NULL
- start_routine 线程运行函数的起始地址,一旦线程被创建就会执行
- 运行函数的参数。他必须通过把引用作为指针强制转换为void类型进行传递。如果没有,则用NULL
线程创建成功后,函数返回0,若返回值不为0则说明创建线程失败
终止线程
pthread_exit(status);but pthread_thread是用于显式地退出一个线程,一般这个线程是在函数是在线程完成工作后无需存在时调用
连接和分离线程
pthread_join(threadid,status);
pthread_detach(threadid);pthread_join() 子程序阻碍调用程序,直到指定的 threadid 线程终止为止。当创建一个线程时,它的某个属性会定义它是否是可连接的(joinable)或可分离的(detached)。只有创建时定义为可连接的线程才可以被连接。如果线程创建时被定义为可分离的,则它永远也不能被连。pthread_join() 函数来等待线程的完成
尝试使用
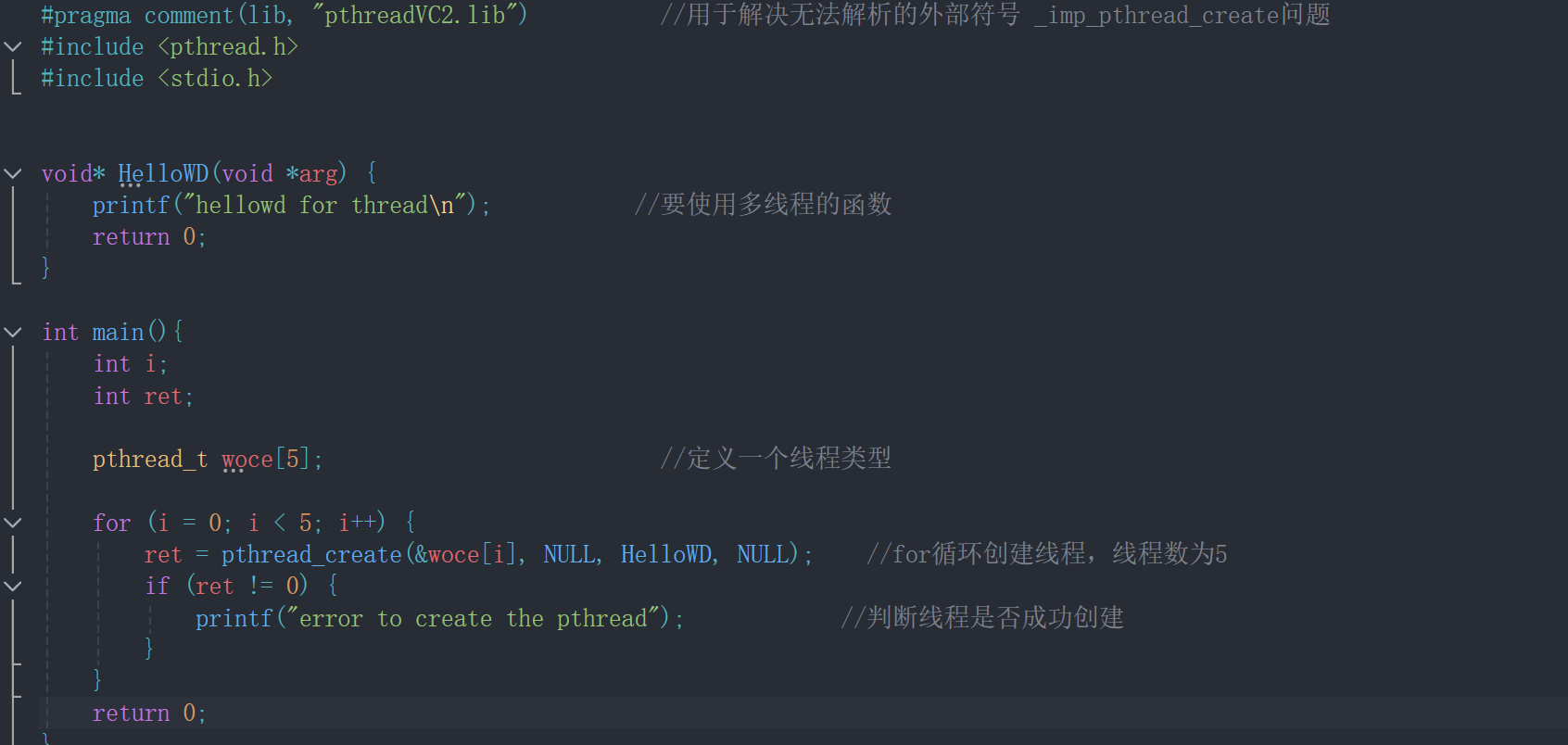
1.无参数传递的并发编程
其中使用的时候遇到了很多问题,翻找文章可以发现解决方案
关于VS2022安装pthread.h多线程库的问题_pthread.h库怎么安装?-CSDN博客
运行结果如下
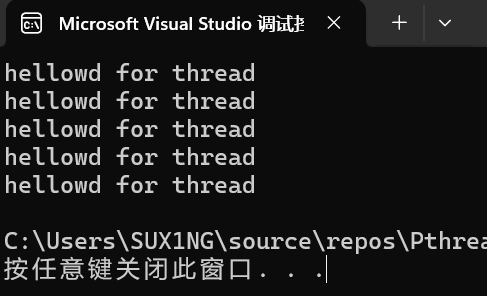
5个线程同时运行HelloWD函数
2.传递参数的并发编程
根据上部分学习的知识,写了以下程序
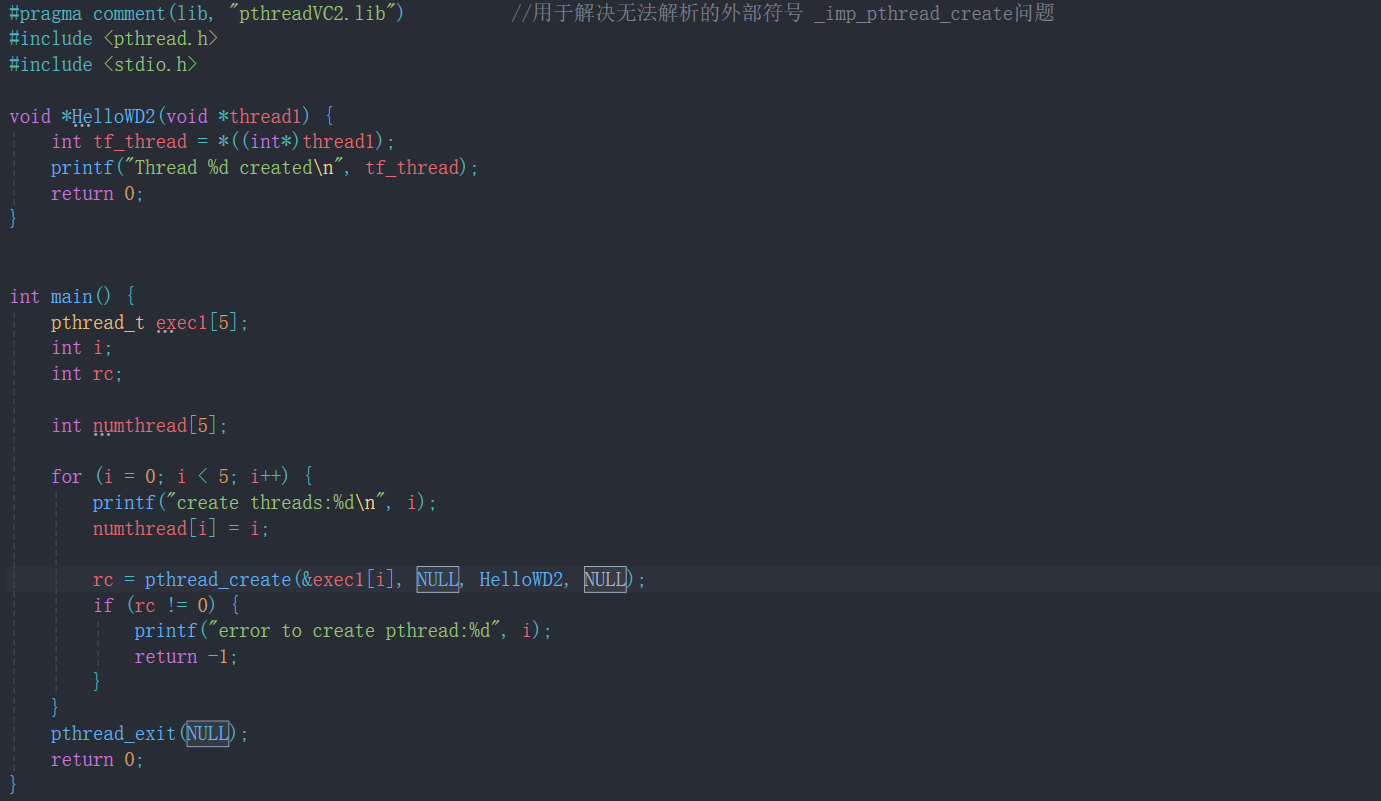
发现运行出来结果并不是我想要的
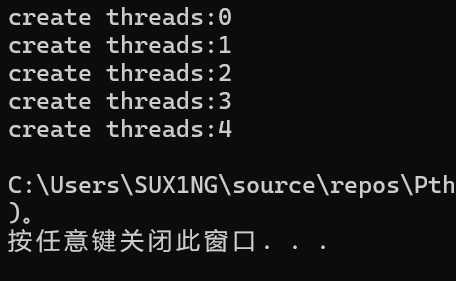
虽然没有输出上面那段函数的内容,但是并没有报线程创建失败
研究了线程创建函数的传参,得知传递的参数必需为无类型指针,将
rc = pthread_create(&exec1,NULL,HelloWD,NULL); //最后的NULL修改为传递的参数
//
rc = pthread_create(&exec1,NULL,HelloWD,(void*)&numthread[i]); //强制转化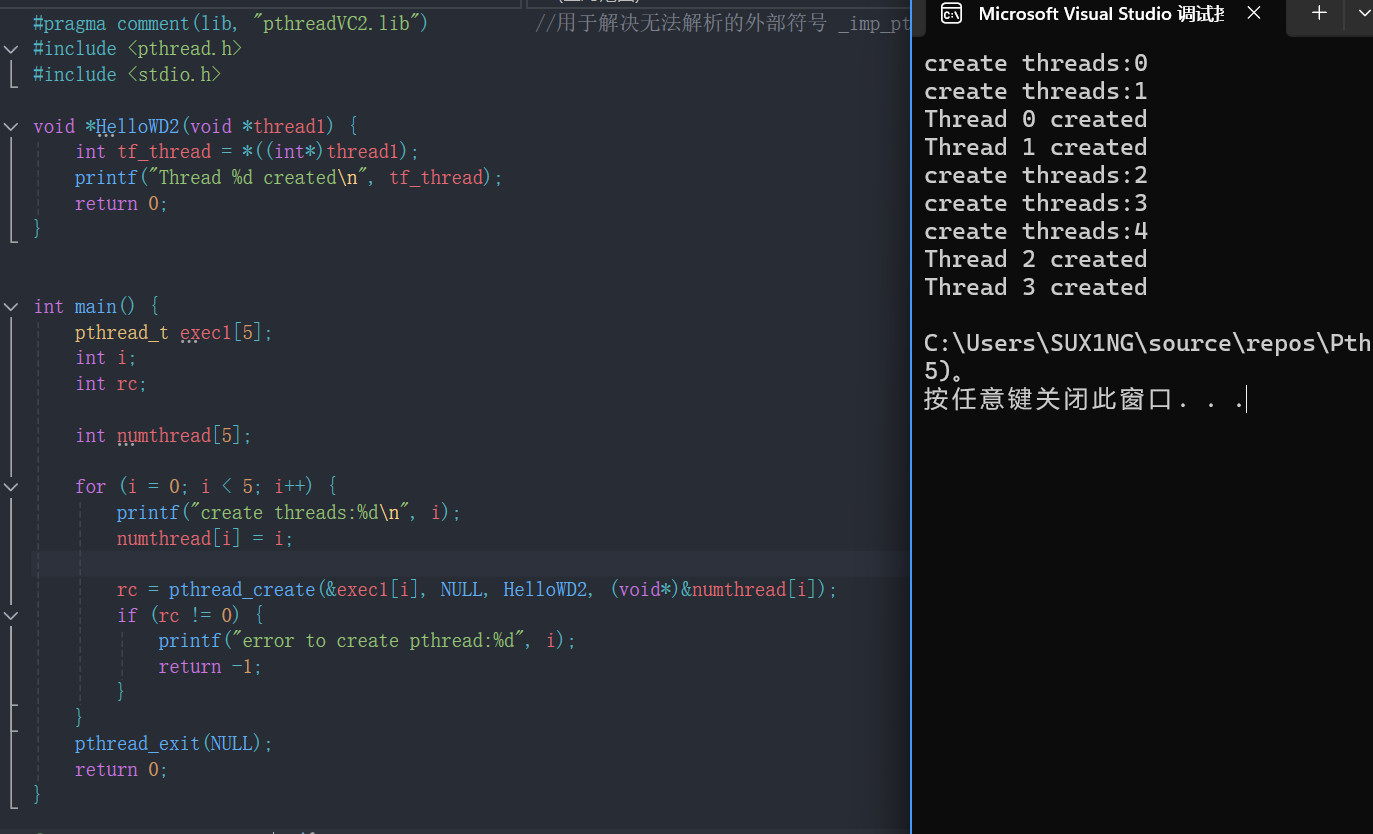
可以看到,线程正确创建并依次执行了
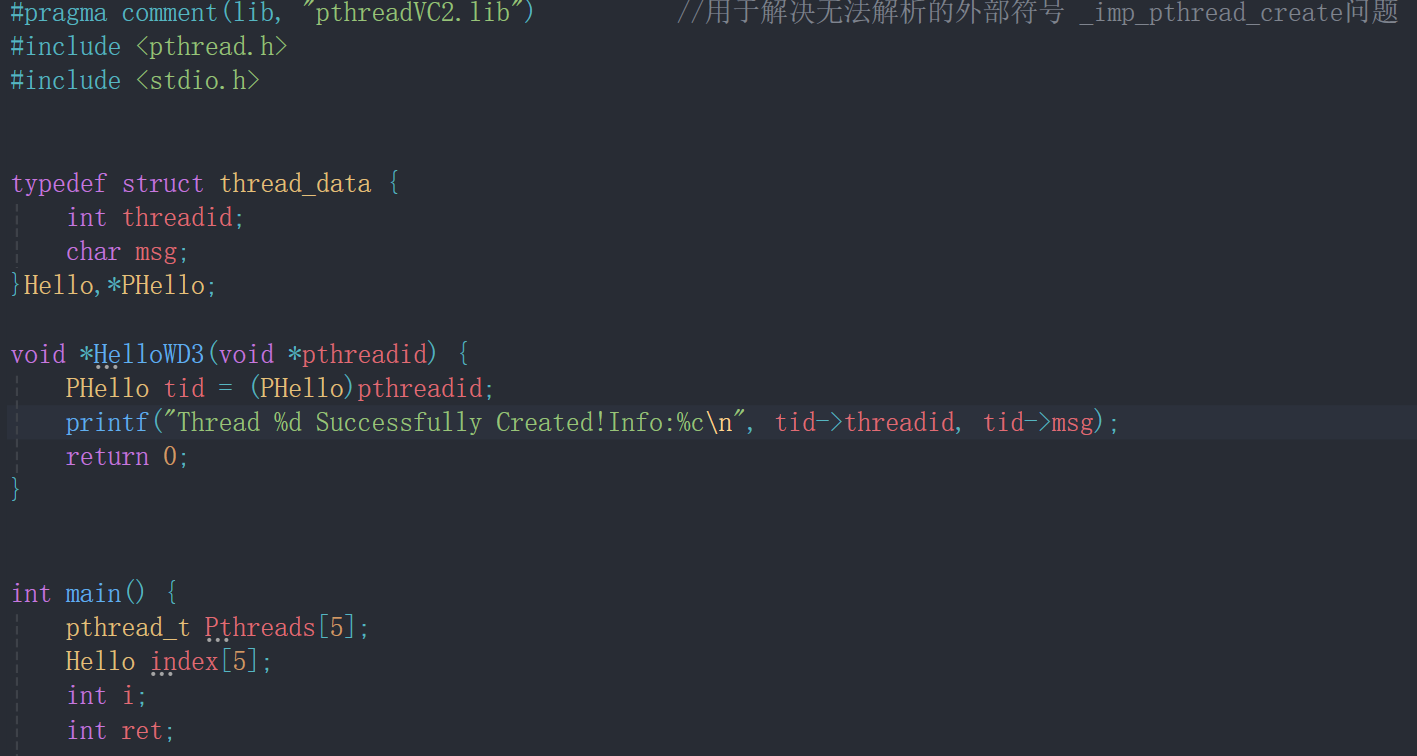
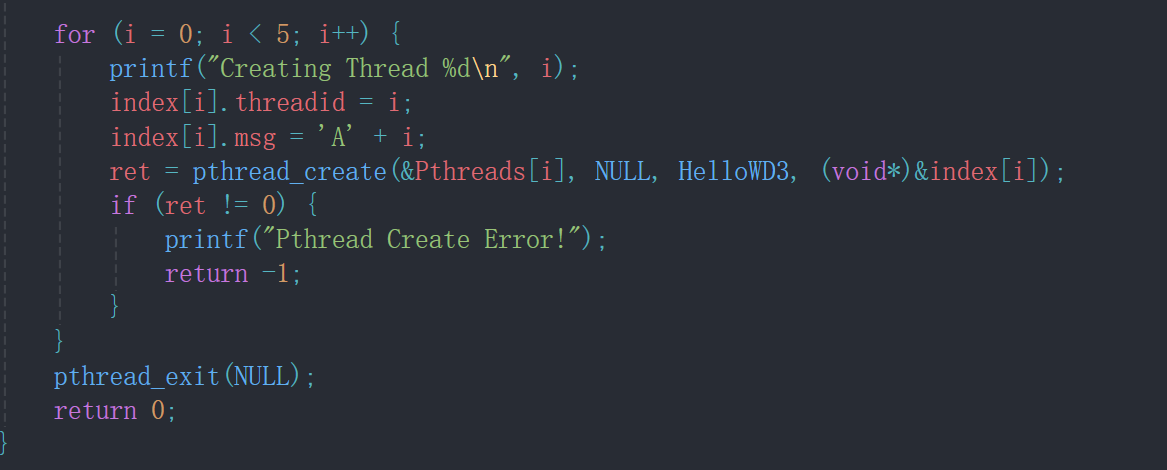
3.结构体参数传递
相比上一个,多出结构体参与参数的传递
结构体定义中,threadid用于记录线程的序号,msg用于记录线程的名称,用数组index[5]来记录threadid和msg的值
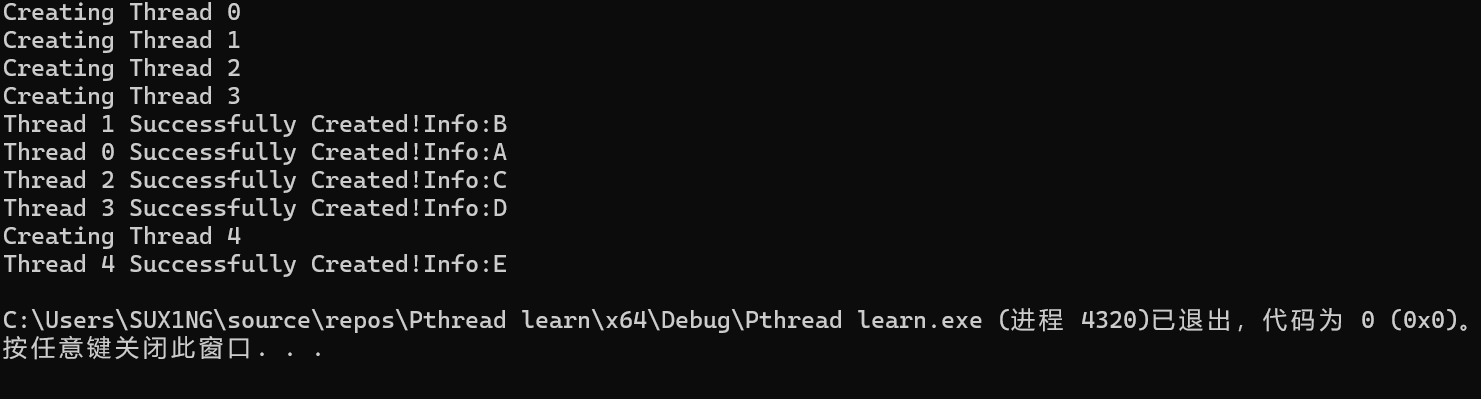
最后成功运行结果为
4.线程之间的连接
按照示例,模仿着敲了一下
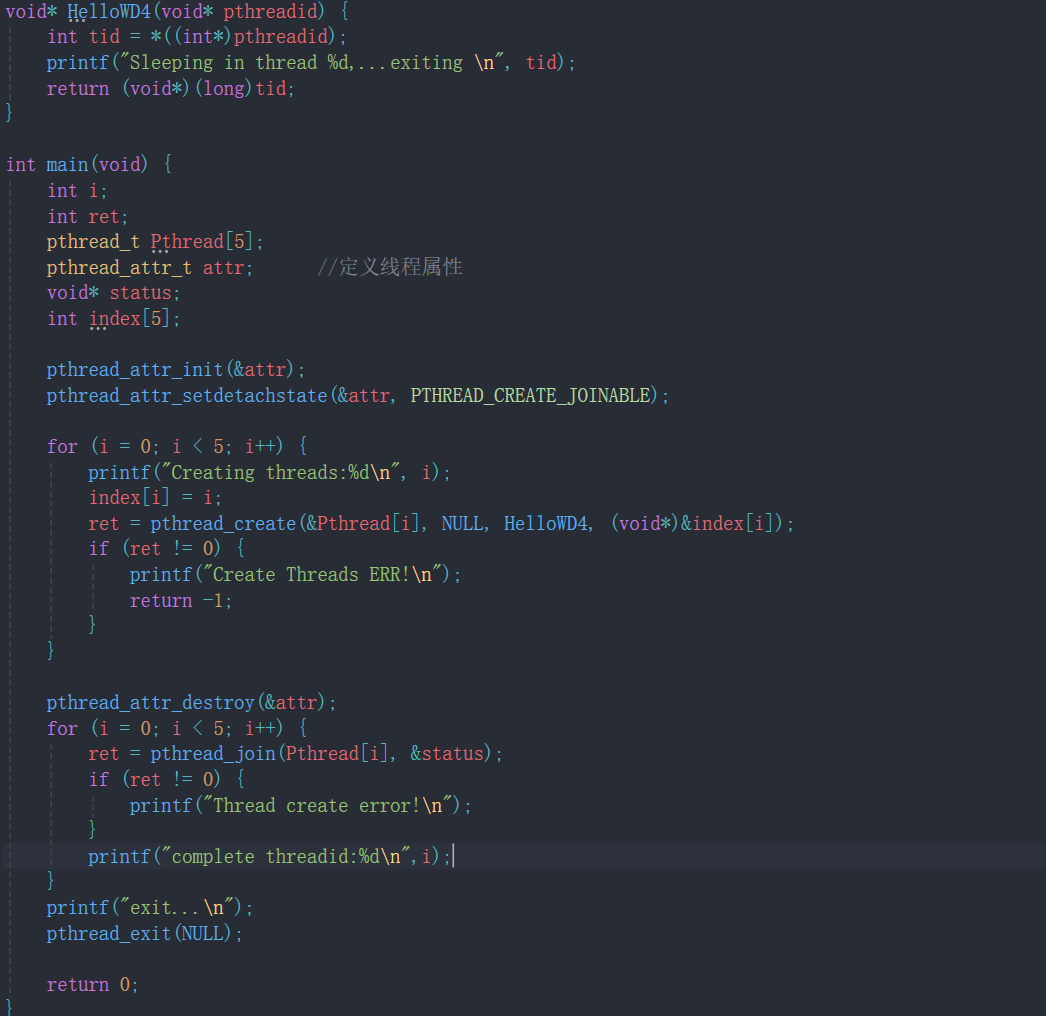
运行结果是这样的
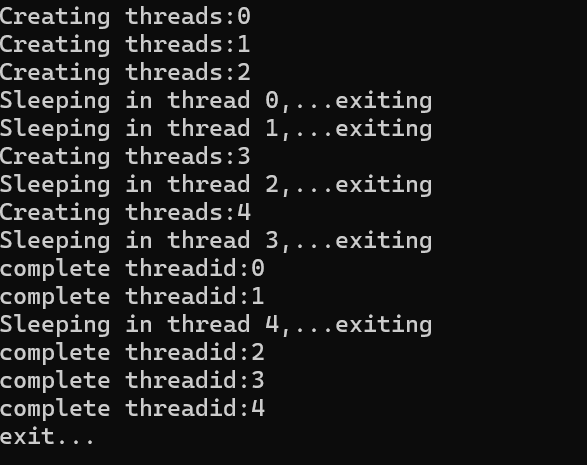
本实例实现了调用线程后,使用pthread_join函数等待threadid线程运行结束后再运行
其中:
1.pthread_attr_init是用于初始化线程对象(本例是attr)
2.pthread_attr_setdetachstate 用于设置线程的分离状态并设置为PTHREAD_CREATE_JOINABLE即可以被其他线程通过pthread_join来等待结束的
3.pthread_attr_destroy是用于销毁属性对象,释放资源
5.多线程作用的实现
typedef struct {
float a;
float b;
}Arg;
float *func1(float a, float b) {
int i;
float* result;
result = (float*)malloc((sizeof(float)) * 2); //分配内存
for (i = 0; i < 1000000000; i++) {
result[0] = a + b;
result[1] = a - b;
}
return result;
}
float* func2(float a, float b) {
int i;
float* result;
result = (float*)malloc((sizeof(float)) * 2);
for (i = 0; i < 1000000000; i++) {
result[0] = a * b;
result[1] = a / b;
}
return result;
}
void *thread_func1(void* args) {
Arg* data = (Arg*)args;
return func1(data->a, data->b);
}
void* thread_func2(void* args) {
Arg* data = (Arg*)args;
return func2(data->a, data->b);
}
int main() {
pthread_t thread1;
pthread_t thread2;
clock_t start;
clock_t end;
float a = 3.1;
float b = 2.4;
Arg ab;
ab.a = a;
ab.b = b;
void* r1, * r2;
start = clock();
pthread_create(&thread1, NULL, thread_func1, (void*)&ab);
pthread_create(&thread2, NULL, thread_func2, (void*)&ab);
pthread_join(thread1, &r1);
pthread_join(thread2, &r2);
end = clock();
float lasttime = (float(end - start)) / CLOCKS_PER_SEC;
printf("timeused:%f\n", lasttime);
return 0;
}写了这样一个程序,使用time.h库中的clock来计算程序运行花费的时间
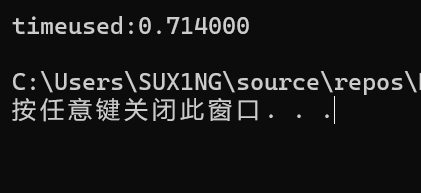
按照上面的写法,计算总共花费0.714s
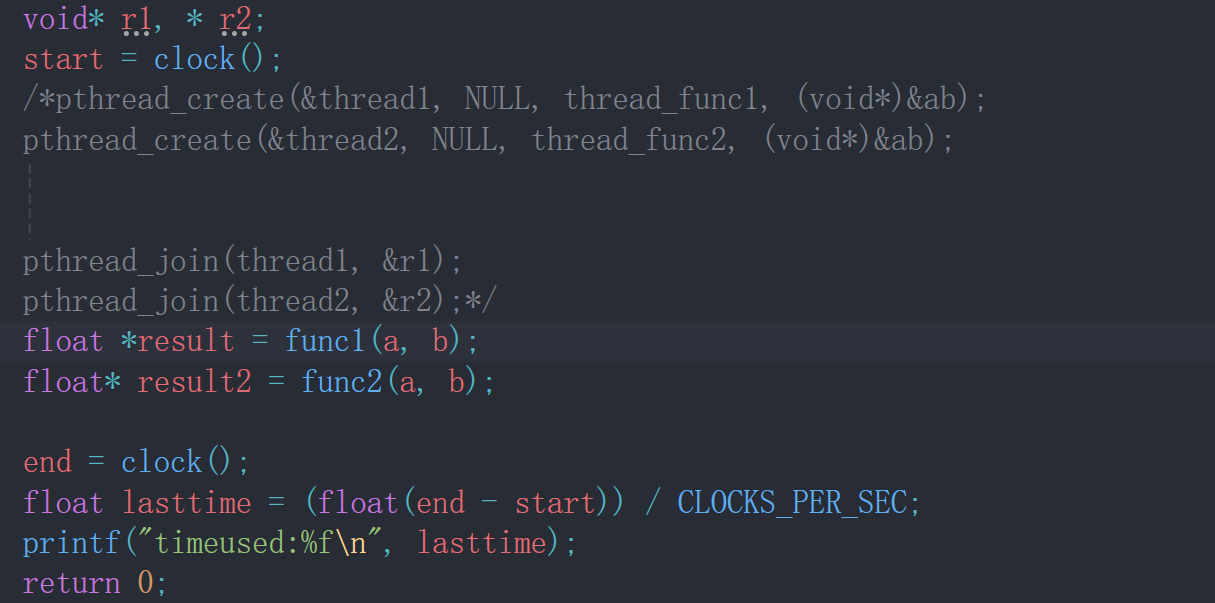
但是,如果我取消多线程用法,改用单线程直接计算
执行两个运算函数花费的时间相当于原来时间的两倍
6.互斥锁和条件
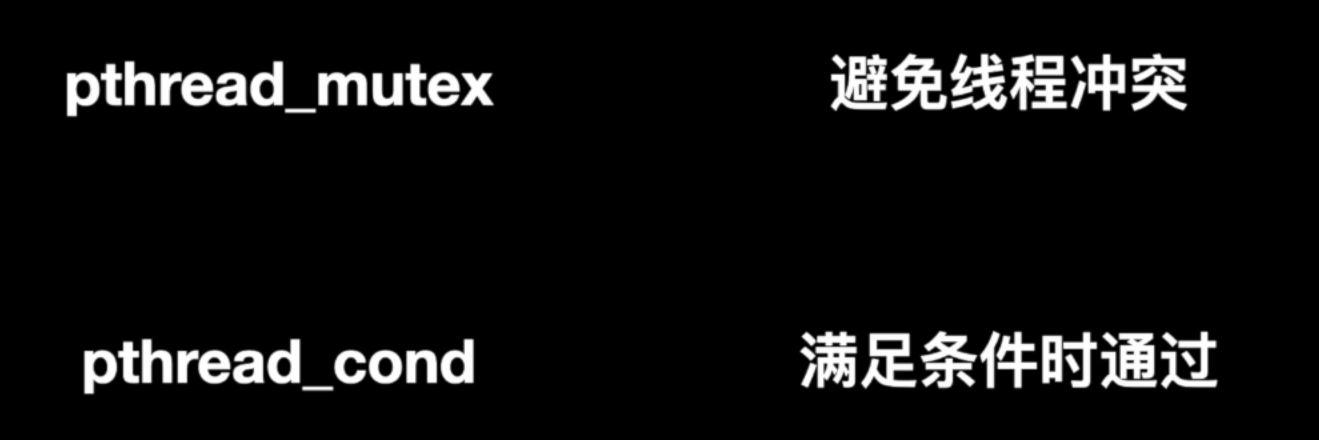
我们可以利用互斥锁,来避免两个线程同时调用同一块内存导致的结果错误
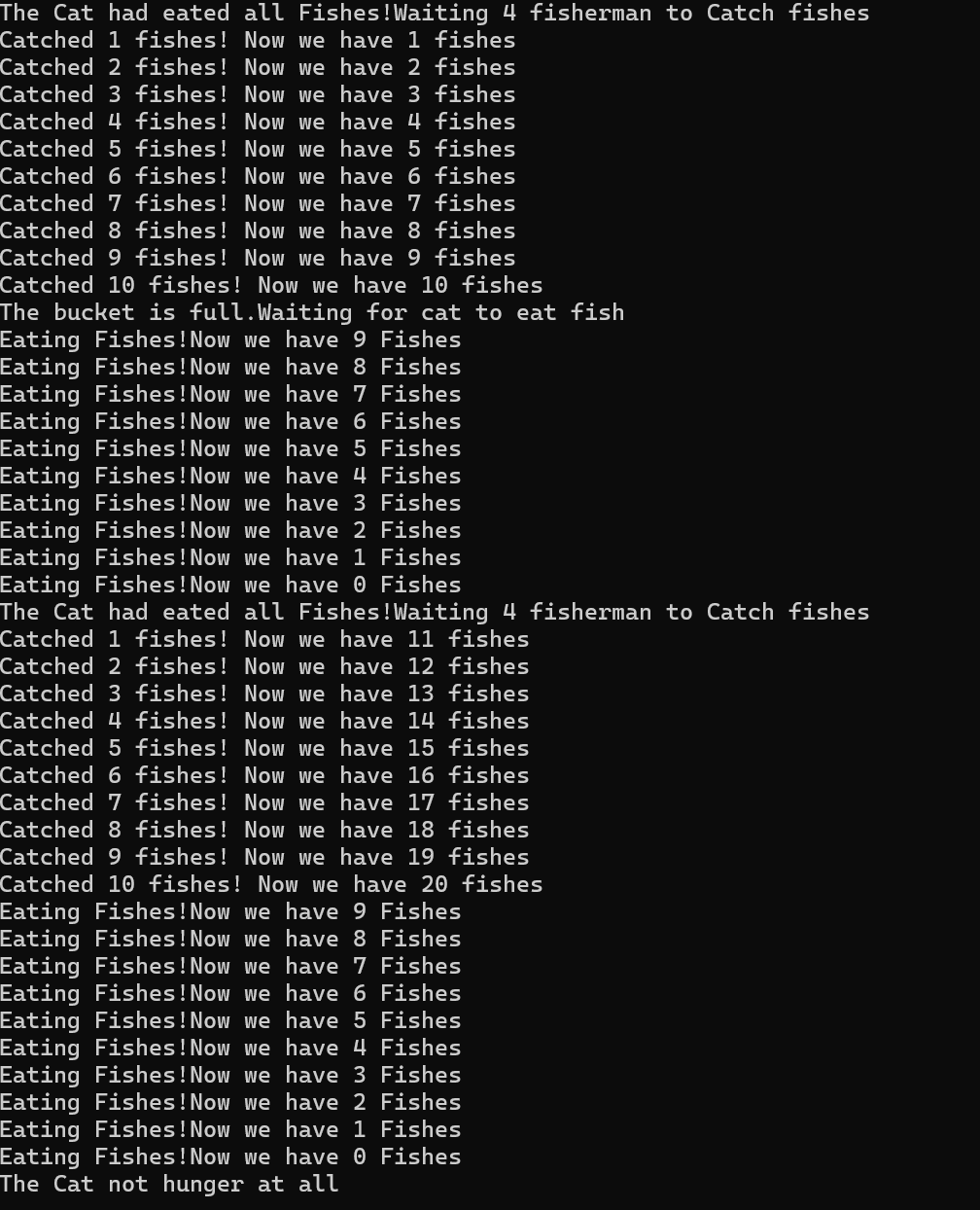
设置一个情景,猫一次要吃二十条鱼,但是框内只能装10条鱼,如果不加以限制,那么猫和渔夫就同时使用框里的鱼,那么渔夫就会一直捕捉鱼。现在限制只能在框装满鱼后猫才能去吃
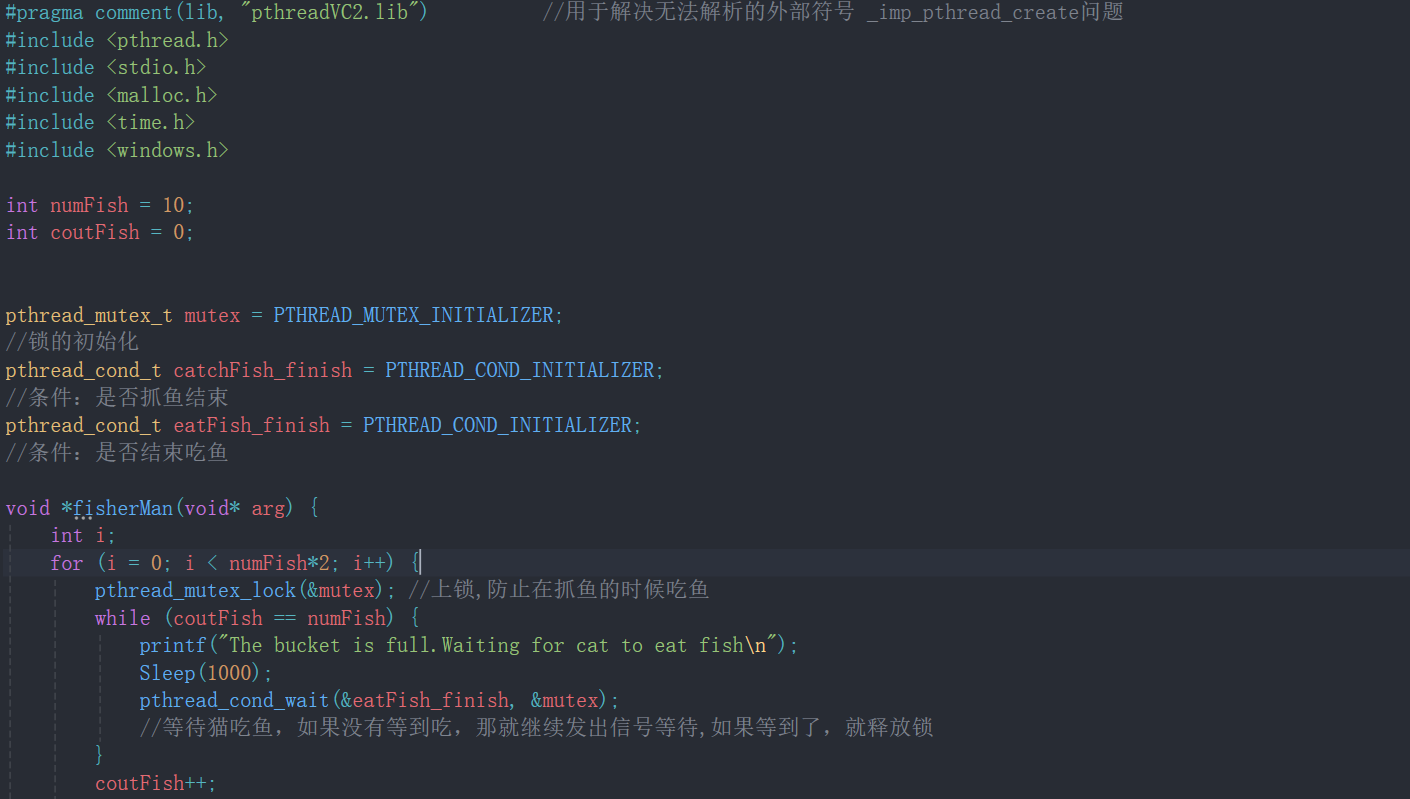
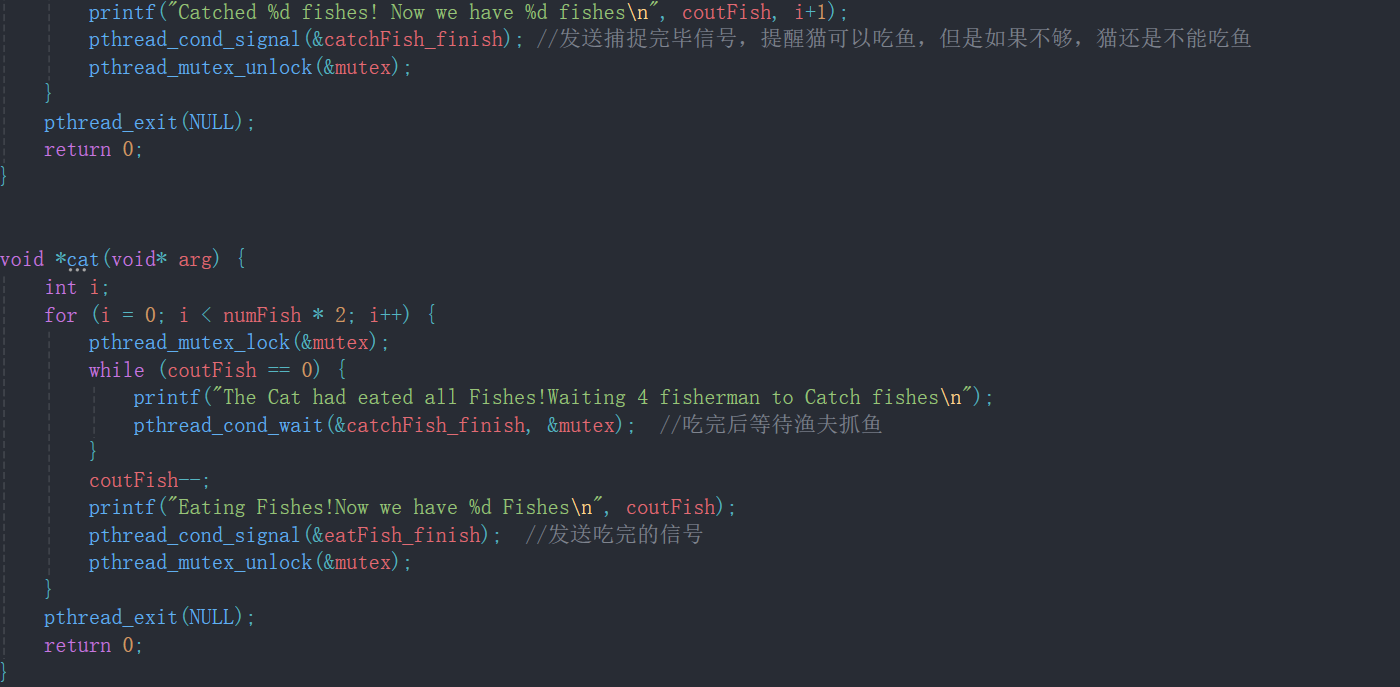
其中,pthread_cond_wait(等待的信号,释放的锁)函数,是用于等待某个信号的发出,如果等到了某个信号,那么将释放互斥锁,发出信号可以使用pthread_cond_signal(发出的信号)
利用两者之间的关系,可以实现多线程之间相互兼容
此代码运行后结果:
多线程总结
线程创建与管理
pthread_create:创建一个新的线程并执行指定的起始函数
pthread_join:等待指定线程结束并获取其返回值
pthread_detach:分离线程,使其在终止时自动回收资源,无需pthread_join
pthread_exit:线程主动退出,可指定返回值
线程同步
pthread_mutex_init,pthread_mutex_destroy:初始化和销毁互斥锁
pthread_mutex_lock,pthread_mutex_unlock:锁定和解锁互斥锁
pthread_cond_init,pthread_cond_destroy:初始化和销毁条件变量
pthread_cond_wait,pthread_cond_signal,pthread_cond_broadcast:线程在条件变量上等待、发送信号或广播信号
线程属性与调度
pthread_attr_init,pthread_attr_destroy:初始化和销毁线程属性对象
pthread_attr_setdetachstate,pthread_attr_getdetachstate:设置和获取线程的分离状态(joinable或detached)
pthread_attr_setschedparam,pthread_attr_getschedparam:设置和获取线程的调度参数(优先级等)
pthread_setschedprio:直接设置线程的优先级
线程取消与清理
pthread_cancel:向指定线程发送取消请求
pthread_setcancelstate,pthread_getcancelstate:设置和获取线程的取消状态(enable或disable)
pthread_setcanceltype,pthread_getcanceltype:设置和获取线程的取消类型(asynchronous或deferred)
pthread_cleanup_push,pthread_cleanup_pop:注册和撤销清理函数,用于线程取消或正常退出时释放资源
线程特定数据
pthread_key_create,pthread_key_delete:创建和删除线程特定数据键
pthread_setspecific,pthread_getspecific:为当前线程设置和获取与特定键关联的数据
其他
pthread_self:获取当前线程的ID
pthread_equal:比较两个线程ID是否相等